基础
模组结构
Camera 模组由
镜头 LENS
对焦马达 VCM
图像传感器 SENOSOR
图像信号处理器 ISP
组成
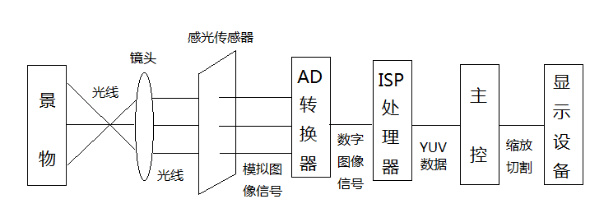
成像原理
镜头(LENS)拍摄影像——>
传感器(SENSOR)接受滤色镜滤波后的光学图像,并转化为电信号——>
A/D转换器将模拟图像信号转为数字图像信号——>
ISP(图像信号处理芯片)加工处理后,通过 IO 口——>
CPU处理成手机屏幕上能够看到的图像。
更多相关细节:http://ju.outofmemory.cn/entry/118955
分类
按模组中的图像传感器
分为 CCD Sensor 和 CMOS Sensor
CMOS 比 CCD 灵敏度低、噪声大,但是成本低、功耗低、集成度高、体积小。
所以手机和平板大多数是 CMOS 模组。
按接口
按接口来划分,Camera 分为 DVP 、 MIPI、usb camera。
DVP是并口,需要PCLK、VSYNC、HSYNC、D[0:11]——可以是8/10/12bit数据,看 ISP 或 baseband 是否支持;
MIPI是LVDS,低压差分串口。只需要要CLKP/N、DATAP/N——最大支持4-lane,一般2-lane可以搞定。
usb camera 相当于集 sensor、isp 驱动于一身的消息通,通过 usb 接口对外提供 YUV、MJpeg 等图像数据。
按模组是否集成 ISP
按照带不带 ISP(图像信号处理器)来划分,分为 SoC Sensor 和 RAW Sensor。
SoC Sensor:自带 ISP,输出 YUV 数据,使用 CIF 接口(通用摄像头接口)。(CIF 接口不带 ISP ,不对 Camera 效果做处理)
RAW Sensor:不带 ISP,输出 sensor 采集原始灰度数据,使用 Mipi 接口。(目前仅 3288 支持这种 Sensor,这种需要我们调试效果,使用 Mipi 接口)
对比
MIPI接口比DVP的接口信号线少,由于是低压差分信号,产生的干扰小,抗干扰能力也强。最重要的是 DVP 接口在信号完整性方面受限制,速率也受限制。500W还可以勉强用DVP,800W及以上都采用MIPI接口。
USB摄像头,即插即用比较灵活,但是由于传输速率的瓶颈,其支持分辨率较低。
硬件原理
Mipi Sensor
原理图
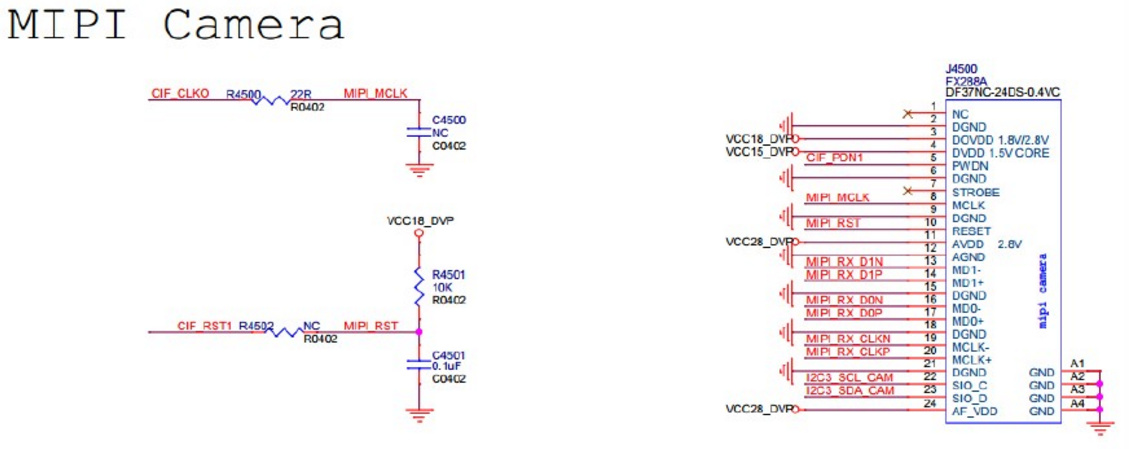
串行总线(CSI-2):clock+、clock-,dataN+,dataN-
控制总线(CCI):SDA,SCK
DVP(digital video port)Sensor
原理图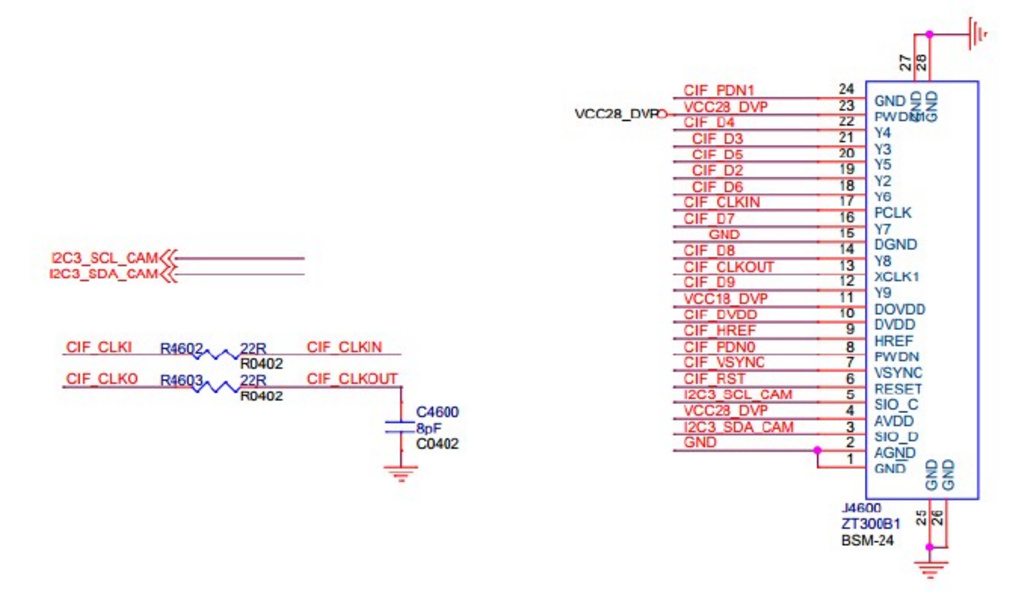
输出总线:PWDN、RST、MCLK、SCK、SDA
输入总线:VSYNC、HSYNC、PCLK、DATA[0-7]
电源总线:AVDD(2.8V)、DVDD(1.8V)、DOVDD(2.8V)
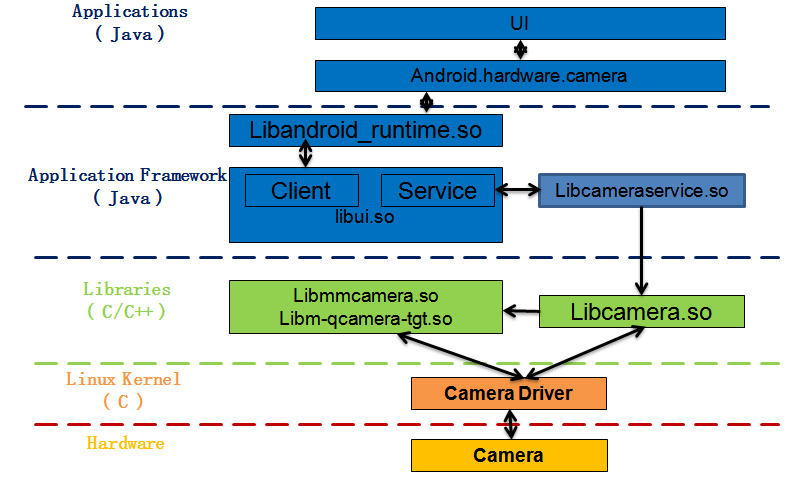
软件架构
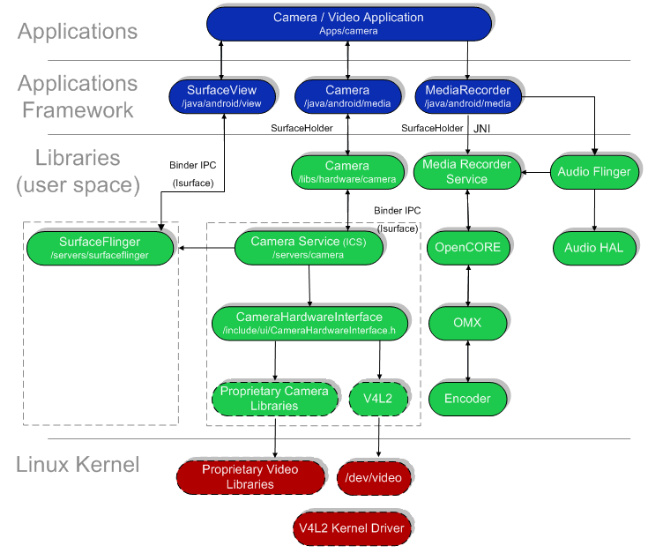
从上至下来看
Application
package/apps/Camera2 这个 APK
Framework
/android/frameworks/base/core/java/android/hardware/Camera.java
1 | android.hardware.Camera |
这个类用来链接或者断开一个 Camera 服务,设置参数,开始、停止预览、拍照等。
这个类和 JNI 中定义的类是一个,有些方法通过JNI的方式调用本地代码得到,有些方法自己实现。
Camera的JAVA native调用部分(JNI):
/android/frameworks/base/core/jni/android_hardware_Camera.cpp。
Camera.java 承接JAVA 代码到C++ 代码的桥梁。
Camera 框架的 client 部分:
/android/frameworks/av/camera下:
Camera.cpp
CameraParameters.cpp
ICamera.cpp
ICameraClient.cpp
ICameraService.cpp
作为Camera 框架的 Client 客户端部分,与另外一部分内容服务端通过进程间通讯(即Binder 机制)的方式进行通讯。
Camera框架的service部分:
/android/frameworks/av/services/camera/libcameraservice。
CameraService 是 Camera 服务,Camera 框架的中间层,用于链接 CameraHardwareInterface 和 Client 部分 ,它通过调用实际的 Camera 硬件接口来实现功能,即下面要提到的HAL层。
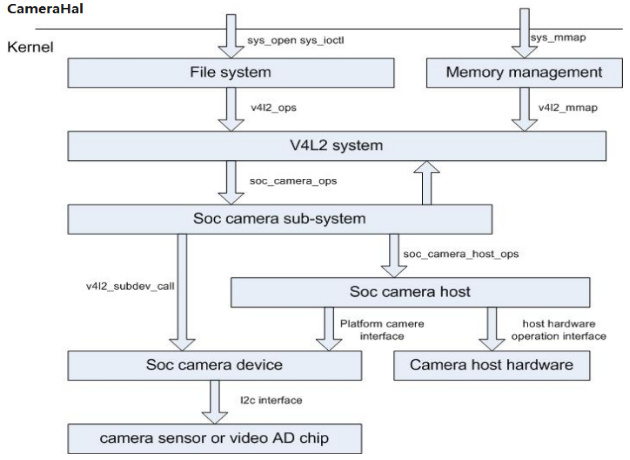
HAL
Camerahal是根据CameraHardwareInterface规定的接口,依据V4l2 规范实例化底层硬件驱动,使用ioctl 方式调用驱动,驱动相关的driver,实现对camera硬件的操作。
代码目录说明:
Android:
|
| hardware\rk29\camera
|
|CameraHal
|
|CameraHal.cpp
|CameraHal.h
|CameraHal_Module.cpp
|CameraHal_Module.h
|CameraSocAdapter.cpp
|CameraHalUtil.cpp
|AppMsgNotifier.cpp
|CameraAdapter.cpp
Kernel
video4linux2(V4L2) 是 Linux内核中关于视频设备的内核驱动,它为Linux中视频设备访问提供了通用接口。
V4L2
代码目录
V4L2 的驱动源码在 drivers/media/video目录下,主要核心代码有:
v4l2-dev.c //linux版本2视频捕捉接口,主要结构体 video_device 的注册
v4l2-common.c //在 Linux 操作系统体系采用低级别的操作一套设备 structures/vectors 的通用视频设备接口
v4l2-device.c //V4L2的设备支持。注册v4l2_device
v4l22-ioctl.c //处理V4L2的ioctl命令的一个通用的框架
v4l2-subdev.c //v4l2子设备
v4l2-mem2mem.c //内存到内存为 Linux 和 videobuf 视频设备的框架,设备的辅助函数,使用其源和目的地videobuf缓冲区。
重要结构体
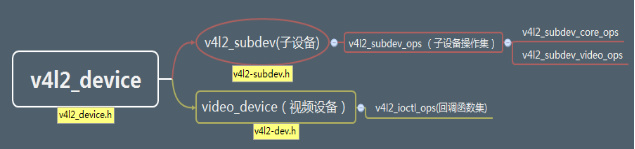
v4l2_device 设备结构体
这个定义在linux/media/v4l2-device.h当中定义
1 | struct v4l2_device { |
V4L2 主要 IO 操作
V4L2驱动的Video设备在用户空间通过各种ioctl调用进行控制,并且可以使用mmap进行内存映射。V4l2主要的IO操作:
VIDIOC_REQBUFS:分配内存
VIDIOC_QUERYBUF:把VIDIOC_REQBUFS中分配的数据缓存转换成物理地址
VIDIOC_QUERYCAP:查询驱动功能
VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
VIDIOC_S_FMT:设置当前驱动的频捕获格式
VIDIOC_G_FMT:读取当前驱动的频捕获格式
VIDIOC_TRY_FMT:验证当前驱动的显示格式
VIDIOC_CROPCAP:查询驱动的修剪能力
VIDIOC_S_CROP:设置视频信号的边框
VIDIOC_G_CROP:读取视频信号的边框
VIDIOC_QBUF:把数据从缓存中读取出来
VIDIOC_DQBUF:把数据放回缓存队列
VIDIOC_STREAMON:开始视频显示函数
VIDIOC_STREAMOFF:结束视频显示函数。
模组驱动
代码目录:
模组驱动源码:driver/media/video/
├── ./gc0308.c
├── ./gc0309.c
├── ./gc0328.c
├── ./gc0329.c
├── ./gc2015.c
├── ./gc2035.c
├── ./hm5065.c
├── ./hm5065.h
├── ./ov2659.c
├── ./ov5640_af_firmware.c
├── ./ov5640.c
├── ./ov5640.h
├── ./generic_sensor.c
├── ./generic_sensor.h
为了简化模组驱动调试,目前模组驱动接口统一做到generic_sensor.c ,generic_sensor.h 这两个文件。
驱动主要围绕v4l2_subdev_core_ops ,v4l2_subdev_video_ops 这两个结构体来实现:
1 | static struct v4l2_subdev_core_ops sensor_subdev_core_ops = {\ |
sensor_probe()函数v4l2_i2c_subdev_init()将sensor_ops加入v4l2_subdev->ops中去了。保证v4l2_subdev和i2c_client能够互相找到,使得soc_camera子系统能够顺利调用相关的ops 。
模组驱动文件(如ov5640.c)则主要填充初始化,预览,录像,全分辨率拍照,白平衡,曝光度等系列。
1 | sensor_init_data[] |
arch/arm/mach-rockchip/rk_camera.c文件实现对摄像头dts配置的解析,并对摄像头的供电,pwrdn,rst,等进行控制。
1 | rk_dts_sensor_probe() //摄像头dts配置的解析 |
调试流程
驱动移植
参考现在的驱动进行驱动移植,注意总线参数配置。
1 | #define SENSOR_BUS_PARAM (V4L2_MBUS_MASTER |
rk3288-cif-sensor.dtsi 根据硬件原理图配置 PWRDN(power down)、PWR(power)、RESET 等 IO 信息 和 I2C、CIF 通道:
DTS 中有很多宏 是在 kernel/arch/arm/mach-rockchip/rk3288-cif-sensor.dtsi 中定义的
1 | gc0308{ |
Rk3288 ,rk3368 配置对应的cam_board.xml文件:
1 | <Sensor> |
USB摄像头主要注意确认如下配置是否选上:
1 | Device Drivers ‐‐‐> |
驱动调试
编译烧录后,先确认 i2c 能否正常通信,video 节点是否创建。打开摄像头应用看图像数据是否接受成功,预览图像是否正常显示,如果没有注意检查 SENSOR_BUS_PARAM 是否设置正确。
问题汇总
i2c通讯异常
确认i2c 通道和地址配置是否正确;
检查pwdn,pwr,reset配置和模组接口是否和硬件匹配;
实地测量pwdn,reset,mclk,摄像头供电输出;
注意IO电压的一致性。
收不到图像数据
DVP接口模组
确认cif通道是否配对;
确认模组排线是否太长,是否有干扰,是否两个摄像头都处于工作状态;
加强模组驱动能力;
测量时钟数据波形。
MIPI 接口模组
确认MIPI通道是否配置正确;
Lane 数是否配置正确;
测试数据波形,确认信号质量。
摄像头角度
判断拍照和预览角度是否一致,调整配置角度;
判断偏的角度是180度还是mirror,flip,调整模组寄存器;
如果偏90度,确认模组打样,模组长边是否和屏的长边平行。
摄像效果问题
观察具体效果,如果只是前帧有问题,可以通过前帧过滤进行处理;
如果是曝光度问题,可以调整默认曝光度进行调整;
如果是图像边界上有几个像素的花条,可以通过CIF控制器少采几行的方法绕过去。
其它色彩,白平衡等效果问题soc sensor找模组原厂支持,如果是rk3288 ,rk3368 上的mipi rawdata sensor 则需要确认模组是否我们这边已调过,如果没有要申请效果调试。
功耗大
确认摄像头是否常供电,调整通过mpu 或者 IO去控制供电开关;
确认摄像头不活动时,模组相关IO是否设为高组态:
如gc2035设为高阻态和恢复输出设置:
1 | static int sensor_activate_cb(struct i2c_client *client) |
启动流程
mediaservice
init.rc 文件
1 | service media /system/bin/mediaserver |
在启动 mediaserver 的时候
main_mediaserver.cpp
1 | int main(int argc,char** argv) |
启动服务中有个关键函数:
1 | camera_get_number_of_cameras |
1 | #define CAMERAS_SUPPORT_MAX 2 |
获取参数到 gCamInfos 中,这里也可以看到最多支持两个摄像头。
v4l2_subdev
v4l2_device 下面一个层次是 v4l2_subdev
如果说 camera host 是一个 v4l2_device,则 camera 模组 是一个 v4l2_subdev
host 和 模组之间的通信一般采用 I2C。
Camera 驱动文件和 v4l2_device 都在 kernel/drivers/media/video 下面。
其中代码比较简单,是一些寄存器数组和简单寄存器逻辑判断组成(如 af),数组包括初始化,预览分辨率,最大分辨率,还有各种效果如曝光,白平衡等需要设置的寄存器组,和设置它们的函数。
v4l2_device
如上面所说,camera host 是一个 v4l2_device 设备,即我们的 CIF 相关的驱动。CIF 驱动较 sub_dev 复杂一点。